Em dezembro, a NASA deu mais um passo - pequeno, porém consistente - na direcção de veículos robóticos de superfície cada vez mais autónomos.
Perseverance, IA e navegação autónoma em Marte: a demonstração dos pontos de passagem
Numa demonstração recente, a equipa do Perseverance usou IA para gerar os pontos de passagem (marcos de navegação) que definem o trajecto do rover. Em dois dias diferentes, o Perseverance seguiu esses pontos de passagem sem controlo humano directo e percorreu, no total, 456 metros.
“Esta demonstração mostra o quanto as nossas capacidades avançaram e amplia a forma como vamos explorar outros mundos”, afirmou o administrador da NASA, Jared Isaacman.
“Tecnologias autónomas como esta podem ajudar as missões a operar com mais eficiência, a reagir a terrenos desafiadores e a aumentar o retorno científico à medida que a distância da Terra cresce. É um bom exemplo de equipas a aplicar tecnologia nova com cuidado e responsabilidade em operações reais.”
Por que a autonomia é inevitável: a demora do sinal entre a Terra e Marte
Marte está muito longe, e existe um atraso de cerca de 25 minutos num ciclo completo de comunicação (ida e volta) entre a Terra e Marte. Na prática, isso significa que, por períodos curtos, os rovers precisam “se virar” sozinhos - quer se queira, quer não.
Essa latência dita o ritmo e o formato do planeamento de rotas. Na Terra, os condutores do rover analisam imagens e dados de elevação e programam uma sequência de pontos de passagem, normalmente espaçados em até 100 metros.
Depois, o plano de condução segue um caminho em cadeia: é enviado para a Rede do Espaço Profundo (DSN) da NASA, que o transmite para um entre vários orbitadores; em seguida, o orbitador faz o retransmissão até o Perseverance.
Como a IA escolheu o caminho: HiRISE, modelos de elevação e Claude
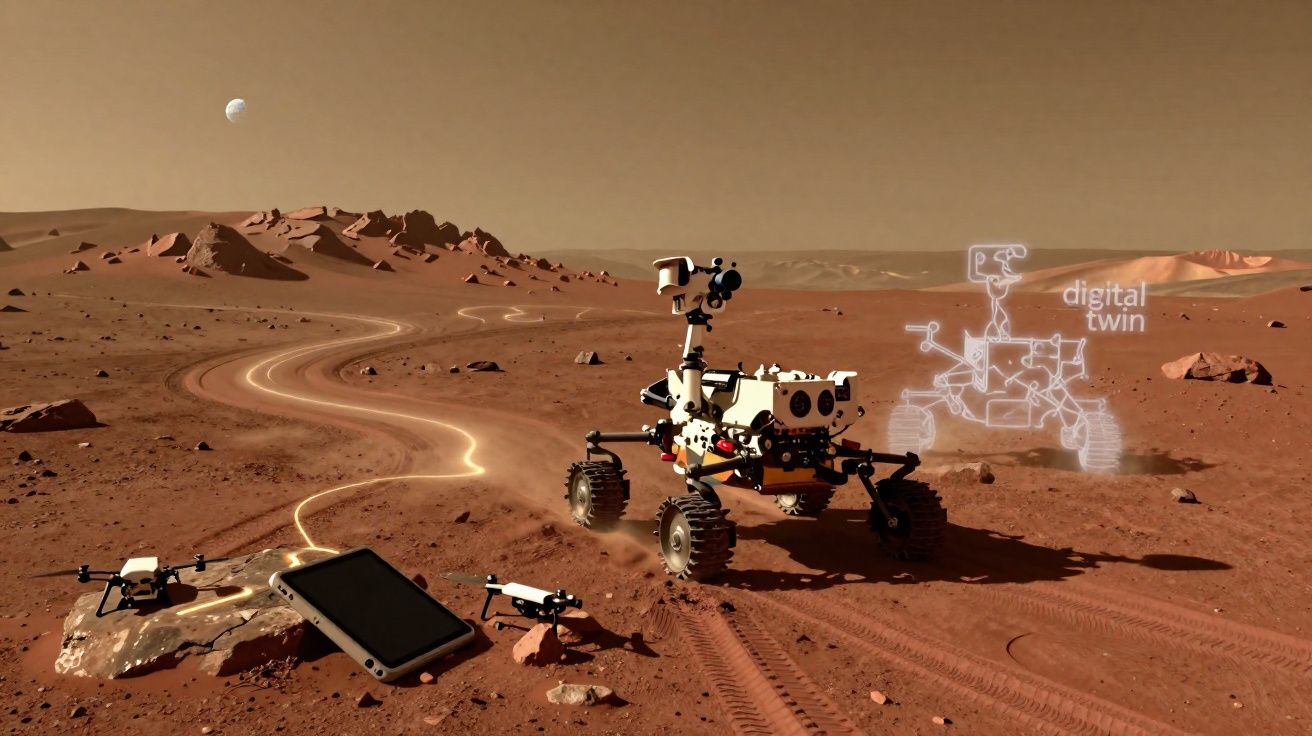
Nesta demonstração, a IA examinou imagens orbitais obtidas pela câmara HiRISE do Orbitador de Reconhecimento de Marte, além de modelos digitais de elevação. O sistema, baseado no Claude (da Anthropic), detectou riscos como armadilhas de areia, campos de rochas, rocha-mãe exposta e afloramentos rochosos. A partir daí, gerou um trajecto composto por uma série de pontos de passagem desenhados para contornar esses perigos.
Com os pontos de passagem definidos, entrou em acção o sistema de auto-navegação do Perseverance. Ele oferece mais autonomia do que os rovers anteriores e consegue processar imagens e planos de condução enquanto se desloca.
O “gémeo” na Terra: VSTB no Pátio de Marte do JPL
Antes de transmitir esses pontos de passagem ao Perseverance, houve um passo adicional relevante. No Laboratório de Propulsão a Jato (JPL), a NASA mantém um “gémeo” do rover chamado Banco de Testes do Sistema do Veículo (VSTB), instalado no Pátio de Marte (a área de testes com terreno simulado).
Esse modelo é uma versão de engenharia usada pela equipa na Terra para investigar problemas e ensaiar situações como esta. Réplicas desse tipo são comuns em missões marcianas - e o JPL também mantém uma equivalente para o Curiosity.
“Os elementos fundamentais da IA generativa estão a mostrar muito potencial para simplificar os pilares da navegação autónoma para condução fora do planeta: percepção (ver as rochas e ondulações), localização (saber onde estamos) e planeamento e controlo (decidir e executar o caminho mais seguro)”, disse Vandi Verma, roboticista espacial do JPL e integrante da equipa de engenharia do Perseverance.
“Estamos a caminhar para um futuro em que a IA generativa e outras ferramentas inteligentes ajudarão os nossos rovers a realizar deslocamentos na escala de quilómetros, reduzindo a carga de trabalho dos operadores, e a sinalizar características interessantes da superfície para a equipa científica ao vasculhar enormes volumes de imagens do rover.”
Não é “moda”: a NASA já precisava de condução automática
A IA está a aparecer rapidamente em todo o lado - inclusive em usos onde nem sempre existe uma necessidade clara.
Neste caso, porém, não se trata de a NASA “entrar na onda” por conveniência. Sistemas de navegação automática vêm sendo desenvolvidos há anos por necessidade operacional. Na prática, o principal modo de deslocamento do Perseverance já é a sua navegação autónoma.
O obstáculo para a autonomia total: a incerteza de posição e a re-localização
Um factor que ainda impede uma condução totalmente autónoma é a forma como a incerteza cresce quando o rover opera sem assistência humana. Quanto mais ele percorre terreno sozinho, maior tende a ser a dúvida sobre a sua posição exacta na superfície.
A saída é re-localizar o rover no mapa. Hoje, essa etapa é feita por pessoas - e isso consome tempo, incluindo um ciclo completo de comunicação entre a Terra e Marte. No fim, esse processo limita o quanto o Perseverance consegue avançar sem “mão humana”.
A NASA/JPL também trabalha numa forma de o Perseverance usar IA para se re-localizar. O maior entrave é fazer a correspondência entre imagens orbitais e as imagens ao nível do solo captadas pelo rover - um tipo de tarefa em que é bastante provável que a IA seja treinada para ter desempenho superior.
O que muda daqui para a frente: rovers, enxames de drones e mais ciência por dia
É difícil ignorar a tendência: a IA deve assumir um papel muito maior na exploração planetária. Um próximo rover marciano pode diferir bastante dos actuais, com navegação autónoma mais avançada e outras funcionalidades baseadas em IA. Já existem conceitos em que um rover liberta um enxame de drones voadores para ampliar o alcance exploratório em Marte; esses enxames seriam coordenados por IA para cooperarem e actuarem de forma autónoma.
Um ponto adicional é que mais autonomia não serve apenas para “andar mais”. Ela tende a aumentar a produtividade científica por dia de missão, porque permite escolher trajectos com menos paragens, reduzir retrabalho e aproveitar janelas operacionais curtas. Em paralelo, a triagem inteligente de imagens e medições pode ajudar a priorizar rapidamente alvos promissores, especialmente quando a equipa científica precisa decidir o próximo passo com base em grandes volumes de dados.
Também vale considerar a dimensão de segurança e validação: para colocar IA em decisões críticas de condução, é essencial testar exaustivamente em ambientes controlados como o VSTB, comparar resultados com planos humanos e criar limites operacionais claros (por exemplo, quando pedir intervenção, quando reduzir velocidade, quando recusar um trajecto). A robustez do sistema depende tanto do algoritmo quanto das regras e verificações que o cercam.
Não é só Marte: Dragonfly em Titã também vai usar IA
Os benefícios não ficam restritos a Marte. A missão Dragonfly da NASA, destinada a Titã (lua de Saturno), deverá utilizar IA de forma ampla - não apenas na navegação autónoma enquanto o veículo de rotores se desloca, mas também na curadoria autónoma de dados.
“Imagine sistemas inteligentes não só no solo da Terra, mas também em aplicações na ponta (embarcadas) nos nossos rovers, helicópteros, drones e outros elementos de superfície, treinados com a sabedoria colectiva dos nossos engenheiros, cientistas e astronautas”, disse Matt Wallace, gestor do Escritório de Sistemas de Exploração do JPL.
“Essa é a tecnologia transformadora de que precisamos para estabelecer a infra-estrutura e os sistemas exigidos para uma presença humana permanente na Lua e para levar os Estados Unidos a Marte e além.”
Este artigo foi publicado originalmente pelo Universe Today. Leia o artigo original.





Comentários
Ainda não há comentários. Seja o primeiro!
Deixar um comentário